视觉(15)sfm的一个例子.
这里采用的是Yi Ma , Stefano Soatto. An Invitation to 3-D Vision , From Images to Geometric Models 的算法
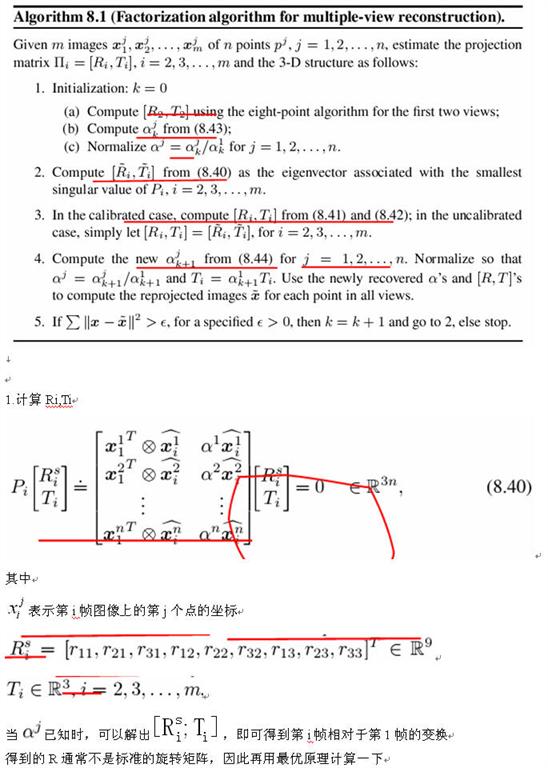
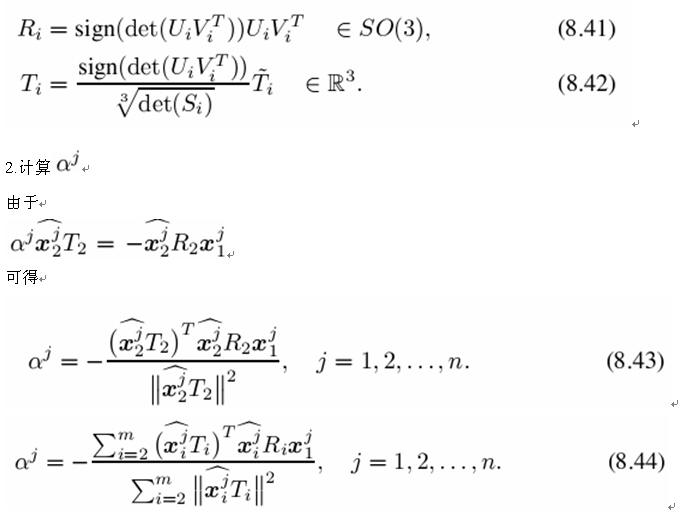
 %// Algorithm 8.1. also 11.7%// Rank based factorization algorithm for multiview reconstruction %// using point features %// as described in Chapter 8, "An introduction to 3-D Vision"%// by Y. Ma, S. Soatto, J. Kosecka, S. Sastry (MASKS)%// Code distributed free for non-commercial use%// Copyright (c) MASKS, 2003%// Generates multiple synthetic views of a house and computes the %// motion and structure, calibrated case, point features only%// Jana Kosecka, George Mason University, 2002%// ======================================================================close all; clear;FRAMES = 3;PLOTS = 3;%// transformation is expressed wrt to the camera frameZinit = 5;%// cube in the object frame XW = [0 1 1 0 0 1 1 0 0.2 0.8 0.2 0.8 ; 0 0 1 1 0 0 1 1 1.5 1.5 1.5 1.5; 1 1 1 1 0 0 0 0 0.8 0.8 0.2 0.2 ; 1 1 1 1 1 1 1 1 1 1 1 1];NPOINTS = 12; XC = zeros(4,NPOINTS,FRAMES);%// initial displacement摄像机的初始位置Rinit = rot_matrix([1 1 1],0); Tinit = [ Rinit(1,:) -0.5 ; Rinit(2,:) -0.5 ; Rinit(3,:) Zinit; 0 0 0 1];%// first camera coodinates XC(:,:,1) = Tinit*XW;%//画出三维的结构 original motion and 3D structurefigure; hold on;plot3_struct(XC(1,:,1),XC(2,:,1),XC(3,:,1));plot3(XC(1,:,1),XC(2,:,1),XC(3,:,1),'*');draw_frame_scaled([diag([1,1,1]), zeros(3,1)],0.5);title('original motion and 3D structure');view(220,20);grid on; axis equal;%// axis off;pause;%// image coordinates 计算第一帧时的图像坐标xim(:,:,1) = project(XC(:,:,1));Zmax = max(XC(3,:,1));Zmin = min(XC(3,:,1));rinc = pi/30;rot_axis = [1 0 0; 0 -1 0]';trans_axis = [1 0 0; 0 1 0]';ratio = 1;rinc = 10; %// rotation increment 20 degreesZmid = (Zmax+Zmin)/2;tinc = 0.5*ratio*Zmid*rinc*pi/180;ploting = 1;for i=2:FRAMES %//计算第i帧的图像坐标xim theta = (i-1)*rinc*pi/180; r_axis = rot_axis(:,i-1)/norm(rot_axis(:,i-1)); t_axis = trans_axis(:,i-1)/norm(trans_axis(:,i-1)); trans = (i-1)*tinc*t_axis; R = rot_matrix(r_axis,theta); %// translation represents origin of the camera frame %// in the world frame T(:,:,i) = ([ R trans; 0 0 0 1]); %// all transformation with respect to the object frame XC(:,:,i) = T(:,:,i)*XC(:,:,1); %// XW; draw_frame_scaled(T(1:3,:,i),0.5); xim(:,:,i) = [XC(1,:,i)./XC(3,:,i); XC(2,:,i)./XC(3,:,i);
%// Algorithm 8.1. also 11.7%// Rank based factorization algorithm for multiview reconstruction %// using point features %// as described in Chapter 8, "An introduction to 3-D Vision"%// by Y. Ma, S. Soatto, J. Kosecka, S. Sastry (MASKS)%// Code distributed free for non-commercial use%// Copyright (c) MASKS, 2003%// Generates multiple synthetic views of a house and computes the %// motion and structure, calibrated case, point features only%// Jana Kosecka, George Mason University, 2002%// ======================================================================close all; clear;FRAMES = 3;PLOTS = 3;%// transformation is expressed wrt to the camera frameZinit = 5;%// cube in the object frame XW = [0 1 1 0 0 1 1 0 0.2 0.8 0.2 0.8 ; 0 0 1 1 0 0 1 1 1.5 1.5 1.5 1.5; 1 1 1 1 0 0 0 0 0.8 0.8 0.2 0.2 ; 1 1 1 1 1 1 1 1 1 1 1 1];NPOINTS = 12; XC = zeros(4,NPOINTS,FRAMES);%// initial displacement摄像机的初始位置Rinit = rot_matrix([1 1 1],0); Tinit = [ Rinit(1,:) -0.5 ; Rinit(2,:) -0.5 ; Rinit(3,:) Zinit; 0 0 0 1];%// first camera coodinates XC(:,:,1) = Tinit*XW;%//画出三维的结构 original motion and 3D structurefigure; hold on;plot3_struct(XC(1,:,1),XC(2,:,1),XC(3,:,1));plot3(XC(1,:,1),XC(2,:,1),XC(3,:,1),'*');draw_frame_scaled([diag([1,1,1]), zeros(3,1)],0.5);title('original motion and 3D structure');view(220,20);grid on; axis equal;%// axis off;pause;%// image coordinates 计算第一帧时的图像坐标xim(:,:,1) = project(XC(:,:,1));Zmax = max(XC(3,:,1));Zmin = min(XC(3,:,1));rinc = pi/30;rot_axis = [1 0 0; 0 -1 0]';trans_axis = [1 0 0; 0 1 0]';ratio = 1;rinc = 10; %// rotation increment 20 degreesZmid = (Zmax+Zmin)/2;tinc = 0.5*ratio*Zmid*rinc*pi/180;ploting = 1;for i=2:FRAMES %//计算第i帧的图像坐标xim theta = (i-1)*rinc*pi/180; r_axis = rot_axis(:,i-1)/norm(rot_axis(:,i-1)); t_axis = trans_axis(:,i-1)/norm(trans_axis(:,i-1)); trans = (i-1)*tinc*t_axis; R = rot_matrix(r_axis,theta); %// translation represents origin of the camera frame %// in the world frame T(:,:,i) = ([ R trans; 0 0 0 1]); %// all transformation with respect to the object frame XC(:,:,i) = T(:,:,i)*XC(:,:,1); %// XW; draw_frame_scaled(T(1:3,:,i),0.5); xim(:,:,i) = [XC(1,:,i)./XC(3,:,i); XC(2,:,i)./XC(3,:,i);  ones(1,NPOINTS)];end;for j = 2:FRAMES T_ini(:,j) = T(1:3,4,j);end;%// noise can be added herefor i=1:FRAMES xim_noisy(:,:,i) = xim(:,:,i);end %// pause 以下为SFM算法%//---------------------------------------------------------------------%// compute initial \alpha's for each point using first two frames only 1)首先用八点算法计算初始的R0,T0(我感觉T0~即1,0帧之间的相对移动~和实际的应该相差常数倍,因此会导致恢复的结构和实际相差常数倍),然后估计lambda。。。[T0, R0] = essentialDiscrete(xim_noisy(:,:,1),xim_noisy(:,:,2));for i = 1:NPOINTS alpha(:,i) = -(skew(xim_noisy(:,i,2))*T0)'* (skew(xim_noisy(:,i,2))*R0*xim_noisy(:,i,1)) /(norm(skew(xim_noisy(:,i,2))*T0))^2; lambda(:,i) = 1/alpha(:,i);endscale = norm(alpha(:,1)); %// set the global scalealpha = alpha/scale; %// normalize everythingscale = norm(lambda(:,1)); %// set the global scalelambda = lambda/scale; %// normalize everything%//---------------------------------------------------------------------%// Compute initial motion estimates for all frames%// Here do 3 iterations - in real setting look at the change of scalesiter = 1;while (iter < 5); for j = 2:FRAMES P = []; %// setup matrix P for i = 1:NPOINTS a = [kron(skew(xim_noisy(:,i,j)),xim(:,i,1)') alpha(:,i)*skew(xim_noisy(:,i,j))]; P = [P; a]; end; %// pause [um, sm, vm] = svd(P); Ti = vm(10:12,12); Ri = transpose(reshape(vm(1:9,12)',3,3)); [uu,ss,vv] = svd(Ri); Rhat(:,:,j) = sign(det(uu*vv'))*uu*vv'; Ti = sign(det(uu*vv'))*Ti/((det(ss))^(1/3)); That(:,j) = Ti; True = T(1:3,4,j); end %// recompute alpha's based on all views lambda_prev = lambda; for i = 1:NPOINTS M = []; %// setup matrix M for j=2:FRAMES %// set up Hl matrix for all m views a = [ skew(xim(:,i,j))*That(:,j) skew(xim(:,i,j))*Rhat(:,:,j)*xim(:,i,1)]; M = [M; a]; end; a1 = -M(:,1)'*M(:,2)/norm(M(:,1))^2; lambda(:,i) = 1/a1; end; scale = norm(lambda(:,1)); %// set the global scale lambda = lambda/scale; %// normalize everything iter = iter + 1end %// end while iter%// final structure with respect to the first frameXF = [lambda.*xim(1,:,1); lambda.*xim(2,:,1); lambda.*xim(3,:,1)];figure; hold on;plot3(XF(1,:,1),XF(2,:,1),XF(3,:,1),'r*');plot3_struct(XF(1,:,1), XF(2,:,1), XF(3,:,1));title('recovered structure');view(220,20);grid on; axis equal;%// axis off;pause;
ones(1,NPOINTS)];end;for j = 2:FRAMES T_ini(:,j) = T(1:3,4,j);end;%// noise can be added herefor i=1:FRAMES xim_noisy(:,:,i) = xim(:,:,i);end %// pause 以下为SFM算法%//---------------------------------------------------------------------%// compute initial \alpha's for each point using first two frames only 1)首先用八点算法计算初始的R0,T0(我感觉T0~即1,0帧之间的相对移动~和实际的应该相差常数倍,因此会导致恢复的结构和实际相差常数倍),然后估计lambda。。。[T0, R0] = essentialDiscrete(xim_noisy(:,:,1),xim_noisy(:,:,2));for i = 1:NPOINTS alpha(:,i) = -(skew(xim_noisy(:,i,2))*T0)'* (skew(xim_noisy(:,i,2))*R0*xim_noisy(:,i,1)) /(norm(skew(xim_noisy(:,i,2))*T0))^2; lambda(:,i) = 1/alpha(:,i);endscale = norm(alpha(:,1)); %// set the global scalealpha = alpha/scale; %// normalize everythingscale = norm(lambda(:,1)); %// set the global scalelambda = lambda/scale; %// normalize everything%//---------------------------------------------------------------------%// Compute initial motion estimates for all frames%// Here do 3 iterations - in real setting look at the change of scalesiter = 1;while (iter < 5); for j = 2:FRAMES P = []; %// setup matrix P for i = 1:NPOINTS a = [kron(skew(xim_noisy(:,i,j)),xim(:,i,1)') alpha(:,i)*skew(xim_noisy(:,i,j))]; P = [P; a]; end; %// pause [um, sm, vm] = svd(P); Ti = vm(10:12,12); Ri = transpose(reshape(vm(1:9,12)',3,3)); [uu,ss,vv] = svd(Ri); Rhat(:,:,j) = sign(det(uu*vv'))*uu*vv'; Ti = sign(det(uu*vv'))*Ti/((det(ss))^(1/3)); That(:,j) = Ti; True = T(1:3,4,j); end %// recompute alpha's based on all views lambda_prev = lambda; for i = 1:NPOINTS M = []; %// setup matrix M for j=2:FRAMES %// set up Hl matrix for all m views a = [ skew(xim(:,i,j))*That(:,j) skew(xim(:,i,j))*Rhat(:,:,j)*xim(:,i,1)]; M = [M; a]; end; a1 = -M(:,1)'*M(:,2)/norm(M(:,1))^2; lambda(:,i) = 1/a1; end; scale = norm(lambda(:,1)); %// set the global scale lambda = lambda/scale; %// normalize everything iter = iter + 1end %// end while iter%// final structure with respect to the first frameXF = [lambda.*xim(1,:,1); lambda.*xim(2,:,1); lambda.*xim(3,:,1)];figure; hold on;plot3(XF(1,:,1),XF(2,:,1),XF(3,:,1),'r*');plot3_struct(XF(1,:,1), XF(2,:,1), XF(3,:,1));title('recovered structure');view(220,20);grid on; axis equal;%// axis off;pause;- 上一篇 Q航天方面几个问题
- 下一篇 自动控制类学生技术类就业分析